
I'm a second-year M.S. ECE student at UCLA. I am fortunate to work with Prof. Anushri Dixit on quadruped locomotion and
with Prof. Yuchen Cui on interactive robot learning. I earned my
B.S. in Computer Engineering at UCLA, with minors in Mathematics and Bioinformatics, where I worked
with Dr. Yizhou Zhao and Prof. Ying Nian Wu. For my senior capstone, I built a
pick-and-place robot with Prof. Ankur Mehta.
My goal is to build
safe and adaptive robots that learns from interactiving with human and the environment. I'm particularly interested in safe and model based reinforcement learning, online learning, and uncertainty quantification.
Research
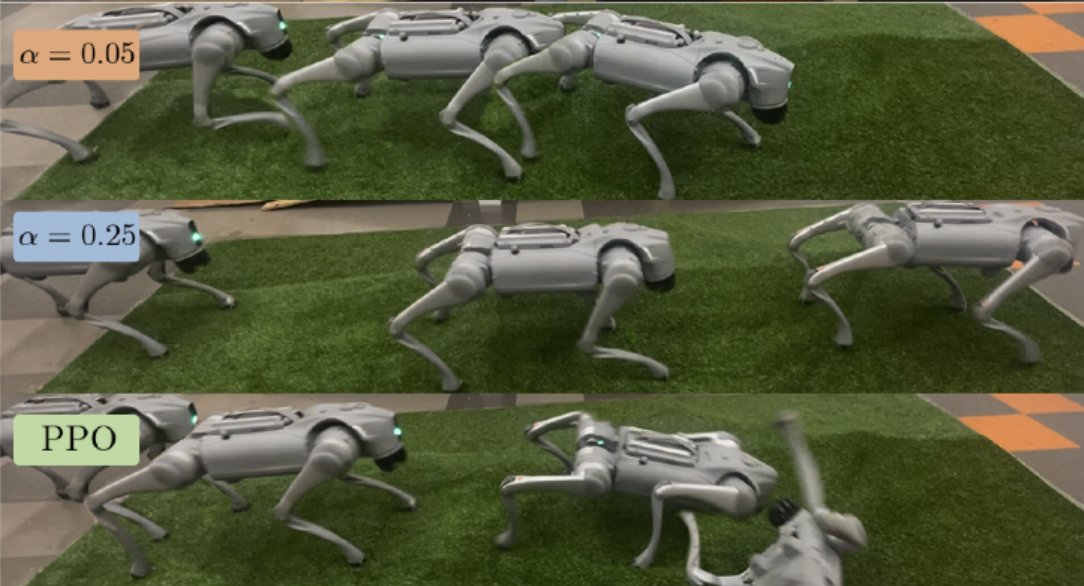 Risk-Aware Reinforcement Learning with Bandit-Based Adaptation for
Quadrupedal Locomotion
Risk-Aware Reinforcement Learning with Bandit-Based Adaptation for
Quadrupedal Locomotion
Yuanhong Zeng, Anushri Dixit
In Submission
Website • Paper • Code
TL;DR: Build CVaR-constrained PPO for risk aware RL and use a bandit to adapt the risk level α online from onboard feedback.
Yuanhong Zeng*, Metin Alp Dogan*, Yuchen Cui,
In preparation
TL;DR: When the policy pauses and asks for help when uncertain. Human user draws a trajectory sketch on a tablet, and we guided-diffusion to turn sketch into corrective actions in real time.
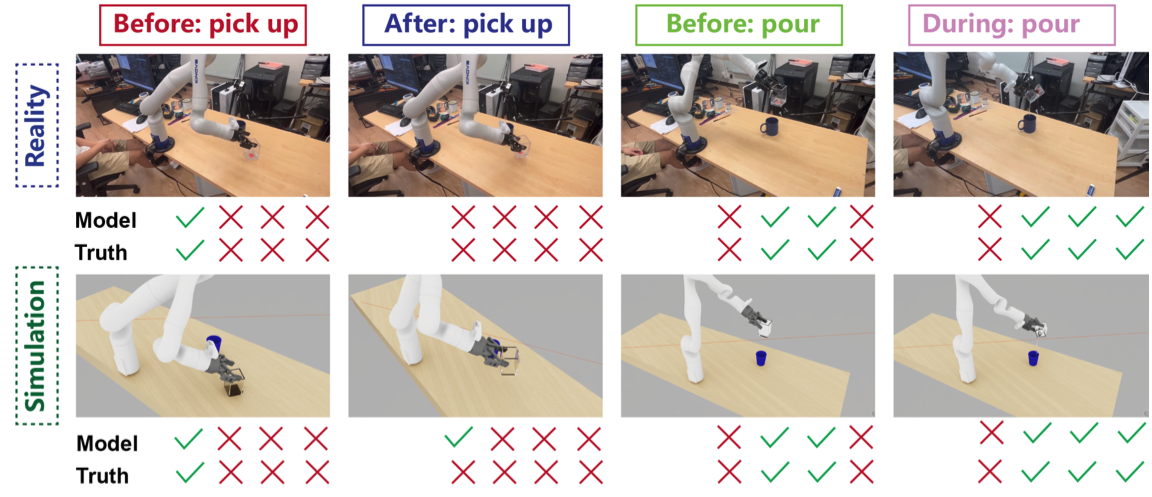 Triple Regression for Sim2Real Adaptation in Human-Centered Robot Grasping and Manipulation
Triple Regression for Sim2Real Adaptation in Human-Centered Robot Grasping and Manipulation
Yuanhong Zeng, Yizhou Zhao, Ying Nian Wu,
Conference on Robot Learning (CoRL 2024) CoRoboLearn Workshop
Website • Paper • Code
TL;DR: Build “digital twins” online and adapt across three spaces—perception, dynamics, and control—to close the sim-to-real gap. This lets us verify plans against real-world observations and correct them before execution.
* equal contribution.
Projects
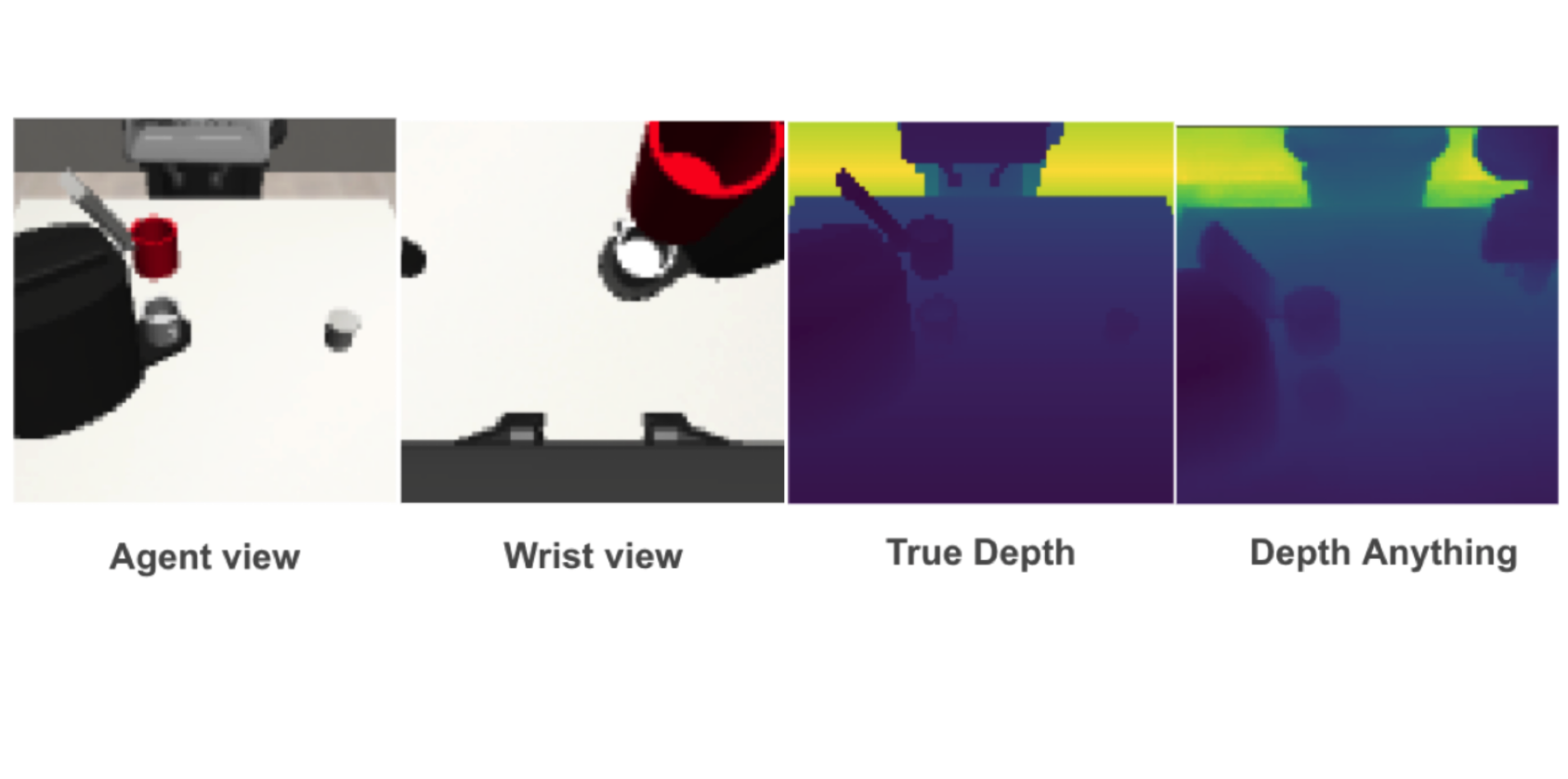 Can Visuomotor
Policy Benefit from 3D?
Can Visuomotor
Policy Benefit from 3D?
We study whether accessible 3D cues—monocular depth (DepthAnything) and a wrist-mounted camera
view—improve visuomotor manipulation policies beyond RGB.
Continue reading →
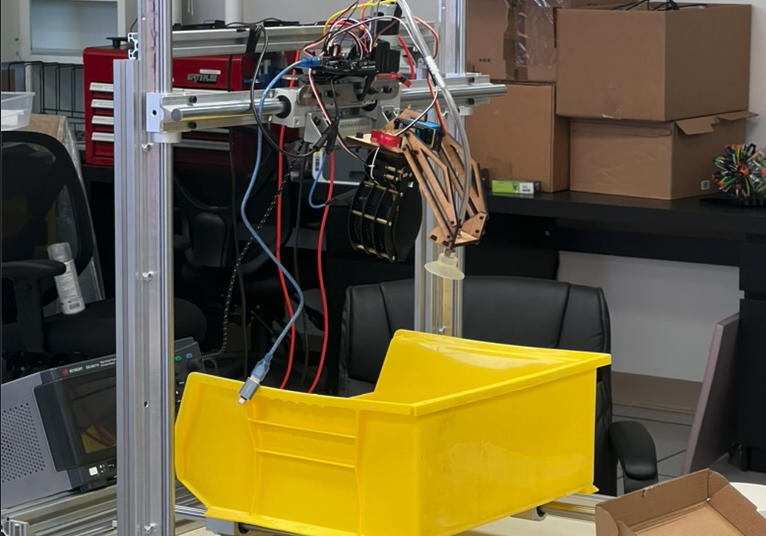 PickyBot - Mobile
Manipulation for Warehouse Pick-and-Place Tasks
PickyBot - Mobile
Manipulation for Warehouse Pick-and-Place Tasks
Senior capstone project integrating SLAM navigation, object segmentation, grasp-pose generation,
and
motion planning, plus a dual-mode gripper (suction + pinch). We evaluated the pipeline in Isaac
Sim and a physical prototype.
Continue reading →
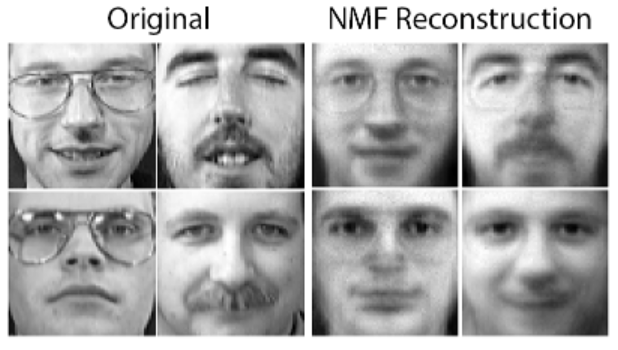 Nonnegative Matrix Factorization
Nonnegative Matrix Factorization
ECE 133B final project surveying algorithms for nonnegative matrix factorization (NMF), a
dimensionality-reduction method that discovers part-based representations.
Continue reading →
Service
- Reader of ECE C247: Deep Learning and Neural Networks and ECE 133A: Applied Numerical Computing
- Reviewer of ICRA 2026, RSS OOD Workshop 2025, CoRL CoRoboLearn Workshop 2024